Appearance
Mesh smoothing (explicit Laplacian + Taubin)
What it does
Attenuates high-frequency surface noise on a triangle mesh by moving each vertex toward the average position of its mesh neighbours. Two flavours are exposed today behind the same TBP, picked by a method argument:
- Explicit Laplacian (
SMOOTH_METHOD_EXPLICIT) —iterationssingle-step applications ofV_new = V + λ ΔV, whereΔVis the uniform-weight Laplacian of the vertex field. Shrinks the volume. Cheap and useful as a building block, but the wrong primitive for production denoising of a closed solid. - Taubin λ|μ (
SMOOTH_METHOD_TAUBIN, default) — alternates a positiveλsmoothing step with a negativeμcounter-shrinking step. Designed by Taubin (1995) to have a band-pass frequency response: high-frequency surface variation gets attenuated while the low-frequency volume stays nearly invariant. The right choice for CFD-grade STL denoising.
A third variant — implicit Laplacian ((M − τL) V_new = M V, unconditionally stable at any step size, requires sparse SPD factorisation) — is deferred until a sparse linear solver is bound to FOSSIL. The public API is forward-compatible with it: when the solver lands, the new variant ships as SMOOTH_METHOD_IMPLICIT and no caller-side change is needed.
Why uniform weights, not cotangent
A natural reading of the cotangent Laplacian page and the Desbrun–Meyer–Schröder–Barr 1999 paper is that the right Laplacian for explicit smoothing is the area-normalised cotangent M⁻¹ L. FOSSIL ships the uniform-weight Laplacian instead, deliberately. The reason:
M_iiis small on dense triangulations (it's the third of the incident triangle area per vertex). On a 100k-facet bunny,min(M_ii)is of order10⁻⁶.- For explicit time-stepping, the stability bound is roughly
λ ≤ 2 / λ_max(M⁻¹ L). With smallM_ii,λ_max(M⁻¹ L)is huge, so any "meaningful"λblows the iteration up. - The uniform-weight Laplacian (
(1/|N(i)|) Σ_{j ∈ N(i)} (V_j − V_i)) is unconditionally stable for anyλ ≤ 1. It loses the discrete- geometry consistency ofM⁻¹ Lbut is the right operator for iterative noise filtering, which is whatsurface%smoothis for.
If you need the area-normalised mean-curvature flow (e.g. for implicit-fairing experiments), build (L, M) via the cotangent Laplacian TBP and time-step it yourself once the solver lands. The shipped TBP is the production-grade denoiser.
Pipeline
Per smoothing step (one for explicit, two — λ then μ — for Taubin):
Per-triangle edge accumulation. For each triangle, each of its three edges contributes to the
(V_j − V_i)accumulator of both endpoints and to both endpoints' neighbour-count accumulator. No adjacency list is materialised — every edge is implicitly visited twice (once per incident triangle), which double-counts both the accumulator and the count symmetrically, so the per-vertex division cancels the factor and the result is the correct uniform- weight Laplacian.Per-vertex update.
Taubin band-pass guard. For
SMOOTH_METHOD_TAUBIN, the second step usesμ < −λ. This is the band-pass condition from Taubin 1995: without it, the iteration is still a low-pass filter (it just shrinks more slowly), which is almost certainly not what the caller wants. The TBP rejects withSMOOTH_STATUS_BAD_INPUTwhenμ ≥ −λrather than silently doing the wrong thing.Re-adopt after the last iteration. Smoothing mutates the per-facet vertex caches in place. After return the TBP calls
adopt_facetsso the vertex pool, connectivity, AABB tree, and pseudo-normals are coherent with the smoothed positions. No further user action is needed before callingdistance,winding_number,mean_curvature, etc.
API
fortran
call surface%smooth(method, lambda, mu, iterations, status)
class(surface_stl_object), intent(inout) :: self
integer(I4P), intent(in), optional :: method ! SMOOTH_METHOD_*
real(R8P), intent(in), optional :: lambda
real(R8P), intent(in), optional :: mu ! TAUBIN only
integer(I4P), intent(in), optional :: iterations
integer(I4P), intent(out), optional :: status ! SMOOTH_STATUS_*Defaults:
| Argument | Default |
|---|---|
method | SMOOTH_METHOD_TAUBIN |
lambda | SMOOTH_DEFAULT_LAMBDA = 0.5 |
mu | SMOOTH_DEFAULT_MU = −0.53 |
iterations | SMOOTH_DEFAULT_ITERATIONS = 5 |
Notes on iterations:
- For
SMOOTH_METHOD_EXPLICIT,iterationsis the number ofλ-steps applied.muis silently ignored. - For
SMOOTH_METHOD_TAUBIN,iterationsis the number of complete(λ, μ)pairs. The default value of 5 thus produces 10 Laplacian applications.
Status codes:
SMOOTH_STATUS_OK— smoothing completed normally.SMOOTH_STATUS_BAD_INPUT— empty surface,iterations ≤ 0, unknownmethod, or Taubin called withμ ≥ −λ.SMOOTH_STATUS_DEGENERATE— at least one triangle had area below tolerance during the per-step Laplacian assembly; the iteration proceeded on the rest. The surface is still re-adopted at the end.
Examples
Taubin denoising of a scanned bunny
fortran
program ex_smooth_taubin
use fossil
use penf, only : I4P, R8P
implicit none
type(surface_stl_object) :: bunny
real(R8P) :: v_before, v_after, a_before, a_after
integer(I4P) :: status
call bunny%load_from_file(file_name='src/tests/bunny.stl', guess_format=.true.)
v_before = bunny%get_volume()
a_before = bunny%get_area()
! 5 Taubin (lambda, mu) pairs = 10 Laplacian applies. Defaults: lambda=0.5, mu=-0.53.
call bunny%smooth(method=SMOOTH_METHOD_TAUBIN, status=status)
v_after = bunny%get_volume()
a_after = bunny%get_area()
print '(A,ES12.5,A,ES12.5)', 'volume before / after = ', v_before, ' / ', v_after
print '(A,ES12.5,A,ES12.5)', 'area before / after = ', a_before, ' / ', a_after
print '(A,F6.3,A)', 'volume drift = ', 100._R8P * abs(v_after - v_before) / v_before, ' %'
print '(A,F6.3,A)', 'area drop = ', 100._R8P * (a_before - a_after) / a_before, ' %'
! Expected: volume drift < 1 %, area drop ~ 0.5-1 % (visible smoothing).
endprogram ex_smooth_taubinExplicit shrink for a building block
fortran
program ex_smooth_explicit
use fossil
use penf, only : I4P, R8P
implicit none
type(surface_stl_object) :: noisy
integer(I4P) :: status
call noisy%load_from_file(file_name='noisy_input.stl', guess_format=.true.)
! One pass at half-strength, only as part of a larger pipeline
! (e.g. before decimation, where local shrinkage doesn't matter).
call noisy%smooth(method=SMOOTH_METHOD_EXPLICIT, lambda=0.25_R8P, &
iterations=1_I4P, status=status)
call noisy%save_into_file(file_name='preprocessed.stl')
endprogram ex_smooth_explicitCustom Taubin parameters
fortran
! Stronger smoothing, more iterations:
call surface%smooth(method=SMOOTH_METHOD_TAUBIN, &
lambda=0.7_R8P, mu=-0.75_R8P, & ! mu < -lambda — band-pass holds
iterations=10_I4P, status=status)
! Catches the band-pass violation:
call surface%smooth(method=SMOOTH_METHOD_TAUBIN, &
lambda=0.5_R8P, mu=-0.4_R8P, & ! mu > -lambda — REJECTED
iterations=5_I4P, status=status)
! status == SMOOTH_STATUS_BAD_INPUT, no mutationVisual reference
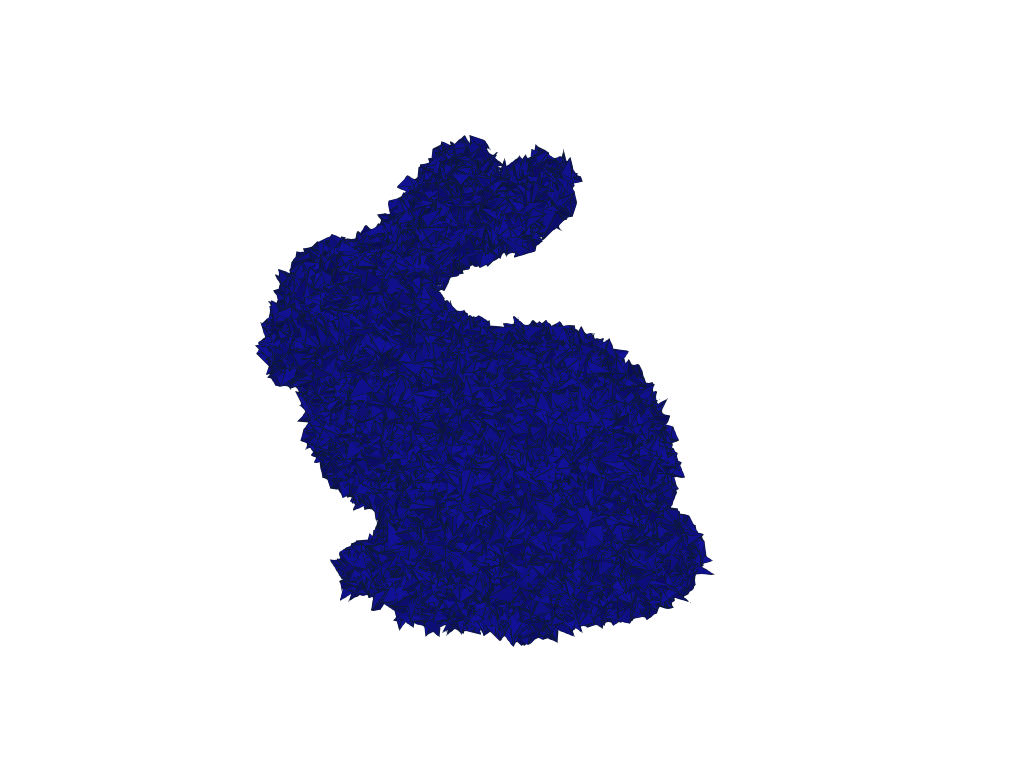
Stanford bunny with deterministic per-vertex Gaussian noise added at ~1 % of the bounding-box diagonal — the "input" panel:
After 5 Taubin (λ, μ) pairs at the defaults (λ = 0.5, μ = -0.53):
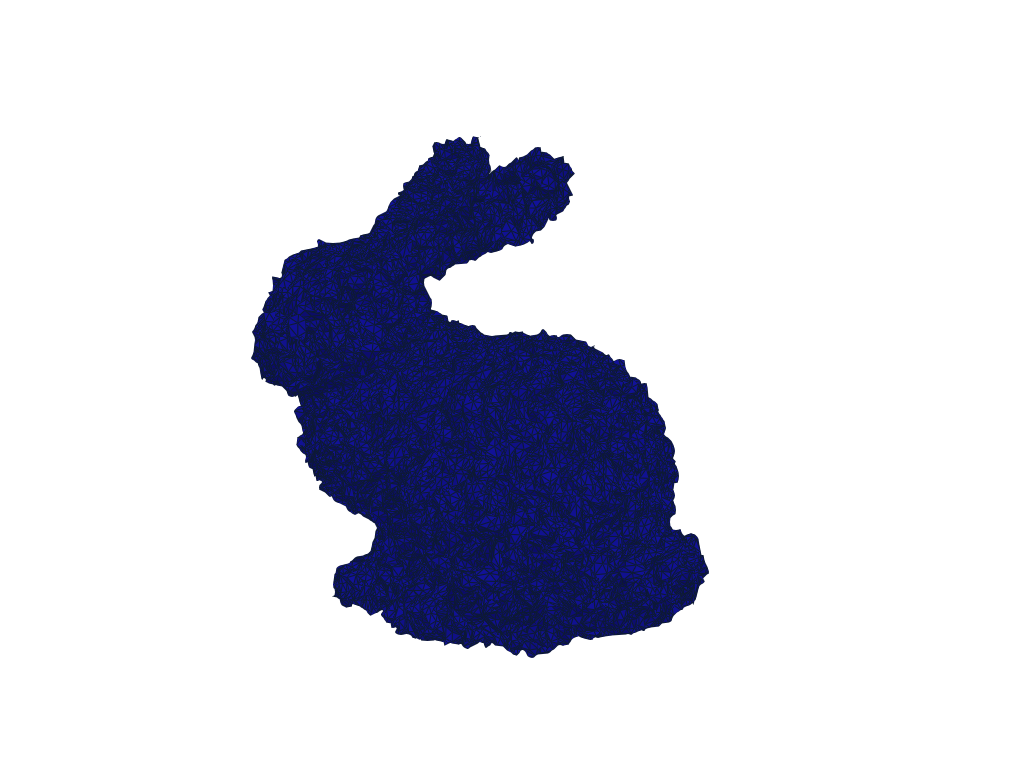
The high-frequency surface "fuzz" is gone — the silhouette and the low-frequency shape (ears, haunch, the overall volume) are preserved. This is the band-pass response Taubin is designed for: it attenuates the noise band without the global shrinkage that plain explicit Laplacian smoothing would cause. The fixture and both renders are reproducible via scripts/make_doc_images.sh (the noise seed is fixed, so the figures are byte-stable across rebuilds).
Known limitations
- Implicit variant not yet shipped. The third method from the §2.3 spec —
(M − τL) V_new = M V, unconditionally stable at anyτ, requires a sparse SPD solver. Deferred until a sparse linear solver (SuiteSparse or alternative) is bound to FOSSIL. The public API is forward-compatible: when the solver arrives, the new variant ships asSMOOTH_METHOD_IMPLICITand no caller-side change is needed. - Sharp-feature blunting. Both explicit and Taubin treat every vertex uniformly. Vertices on a sharp edge (e.g. cube corners) get pulled inward by neighbour averaging and the feature blurs. If feature preservation matters, run §1.7 isotropic remeshing (which has a built-in dihedral-angle feature lock) instead, or restrict smoothing to a feature-aware vertex mask externally before calling
smooth. - Boundary vertices on open meshes lose neighbours on the boundary side, so the uniform-weight Laplacian pulls them inward toward the interior centroid. This is rarely an issue for FOSSIL's target workload (closed solids from CAD STL) but matters if you smooth an open shell.
- Degenerate-triangle skip. Triangles below the area tolerance are skipped during Laplacian assembly. Their incident vertices simply receive less averaging that step; they aren't removed. Run §1.3 decimation or
sanitizebeforesmoothif degenerate triangles dominate the input. - The cube test of
fossil_test_smoothingconfirms only that the degenerate-input case (corner-only mesh, no flat interior) returnsSMOOTH_STATUS_OKwithout crashing — the cube geometry collapses under uniform-weight smoothing because every corner is pulled toward the face centroid. Use Taubin's parameters for production inputs; the cube is a "doesn't crash on a pathological input" guard, not a recommended use case.
See also
- cotangent Laplacian — the prerequisite that the future implicit smoothing variant depends on. The shipped explicit + Taubin variants use a different Laplacian (uniform weights, not cotangent) for stability — see "Why uniform weights, not cotangent" above.
- per-vertex curvature — running a few Taubin passes before
mean_curvaturegives noticeably cleaner curvature fields without volume loss. - isotropic remeshing — has built-in feature-preserving tangential relaxation. Use it instead of smoothing when sharp edges matter.
- Constants —
SMOOTH_STATUS_*,SMOOTH_METHOD_*,SMOOTH_DEFAULT_LAMBDA,SMOOTH_DEFAULT_MU,SMOOTH_DEFAULT_ITERATIONS.
References
- Taubin, A signal-processing approach to fair surface design, SIGGRAPH 1995. The reference paper for the
λ\|μnon-shrinking alternation that FOSSIL ships as the default. - Desbrun, Meyer, Schröder & Barr, Implicit fairing of irregular meshes using diffusion and curvature flow, SIGGRAPH 1999. The reference for the implicit variant deferred until a sparse solver is bound; also explains why area-normalised cotangent smoothing is unstable on dense meshes for explicit time-stepping (Section 3.2).
- Botsch, Kobbelt, Pauly, Alliez & Lévy, Polygon Mesh Processing, A K Peters 2010, Chapter 4. Book-length treatment of mesh smoothing including the feature-preservation extensions that motivate falling back to isotropic remeshing for sharp-feature inputs.