Appearance
Boolean operations
What it does
Combines two surfaces using one of the four standard set operations: union (A ∪ B), intersection (A ∩ B), difference (A \ B), or symmetric difference (A △ B). The result is a fresh watertight solid that replaces self in place.
This is the single biggest missing primitive for an STL toolkit — every meshing pipeline that combines parts needs booleans. CSG modelling, cutting holes for cooling channels, removing fixturing from a part for CFD analysis, building wings from intersecting NACA sections. FOSSIL's boolean is on par with libigl's igl::mesh_boolean and CGAL's nef-polyhedra-free boolean for the generic case.
Pipeline
The implementation follows Zhou et al. (SIGGRAPH 2016) "Mesh Arrangements for Solid Geometry":
Cross-mesh tree-vs-tree intersection collection (
fossil_arrangement). Both surfaces' AABB trees walked in lockstep; every triangle pair whose AABBs overlap is tested for actual triangle-triangle intersection (Möller). The collected intersection segments form the arrangement.CDT-based facet retriangulation. Every input triangle that participates in an intersection is split into sub-triangles along its share of the arrangement segments. FOSSIL's own
fossil_dtmodule (Bowyer-Watson + Sloan constraint recovery) does the constrained Delaunay triangulation in the facet's plane.Per-sub-triangle classification (
fossil_boolean). For each sub-triangle's centroid, evaluate the winding number against both input solids:(in_A?, in_B?)is a 2-bit tag.Truth-table selection per operation:
Tag UNION INTERSECT DIFFERENCE (A\B) SYMDIFF (in, in) keep keep drop drop (in, out) keep drop keep keep (out, in) keep drop drop keep (out, out) drop drop drop drop Special-case row for sub-triangles on the shared boundary of A and B: their orientation determines which operation wants them.
Adopt the surviving sub-triangles into
selfviaadopt_facets(rebuilds AABB tree, vertex pool, connectivity, pseudo-normals).
API
fortran
call surface%boolean(other, op, status)
class(surface_stl_object), intent(inout) :: self
class(surface_stl_object), intent(in) :: other
integer(I4P), intent(in) :: op ! BOOL_*
integer(I4P), intent(out), optional :: status ! BOOL_STATUS_*opis one of:BOOL_UNION— everything inside either bodyBOOL_INTERSECT— only what's inside bothBOOL_DIFFERENCE— insideself(A) but not insideother(B)BOOL_SYMDIFF— inside exactly one ofself,other
status∈{BOOL_STATUS_OK, BOOL_STATUS_CDT_FAILED, BOOL_STATUS_NOT_IMPLEMENTED, BOOL_STATUS_EMPTY_INPUT}. Most failures are degenerate-input-related (CDT couldn't recover a near-collinear constraint). The CDT failure mode is documented infossil_dt's docstring.
Pre-conditions for clean output (enforced by example, not by runtime check — set them up yourself):
- Both inputs are watertight, manifold solids (
is_volume() == .true.). - Both have outward-oriented normals — run
surface%sanitize_normalsif you're not sure. - The intersection between A and B doesn't trip the CDT's recovery loop (true for any pair of solids in generic position; coplanar faces are the only known trouble).
Example
Two unit cubes offset diagonally by (0.5, 0.5, 0.5) — the canonical mesh-arrangement test case:
fortran
program ex_boolean
use fossil
use penf, only : I4P, R8P
use vecfor, only : vector_R8P
implicit none
type(surface_stl_object) :: a, b
integer(I4P) :: status
call a%load_from_file(file_name='src/tests/cube.stl', guess_format=.true.)
call b%load_from_file(file_name='src/tests/cube.stl', guess_format=.true.)
call b%translate(delta=vector_R8P(0.5_R8P, 0.5_R8P, 0.5_R8P))
call b%analyze
! In-place boolean: a is replaced by (a OP b).
call a%boolean(other=b, op=BOOL_DIFFERENCE, status=status)
print '(A,I0,A,F8.4)', 'A \ B status=', status, ' vol=', a%get_volume()
! Expected analytic volume: 1 - 0.5^3 = 0.875
endprogram ex_booleanVisual reference
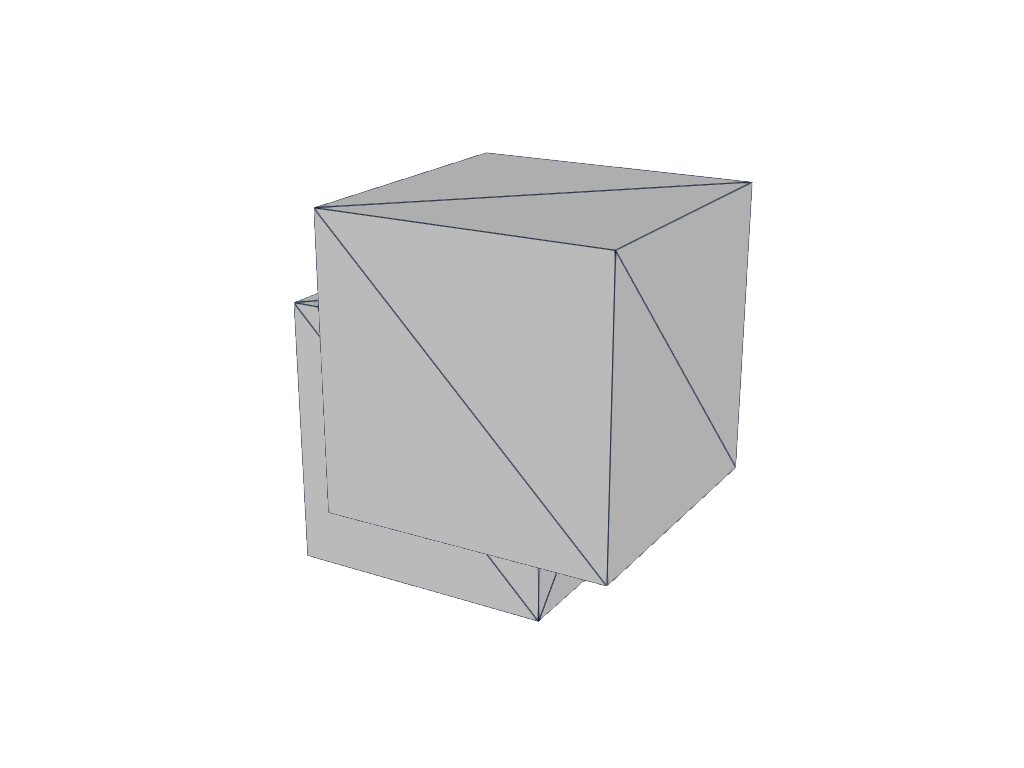
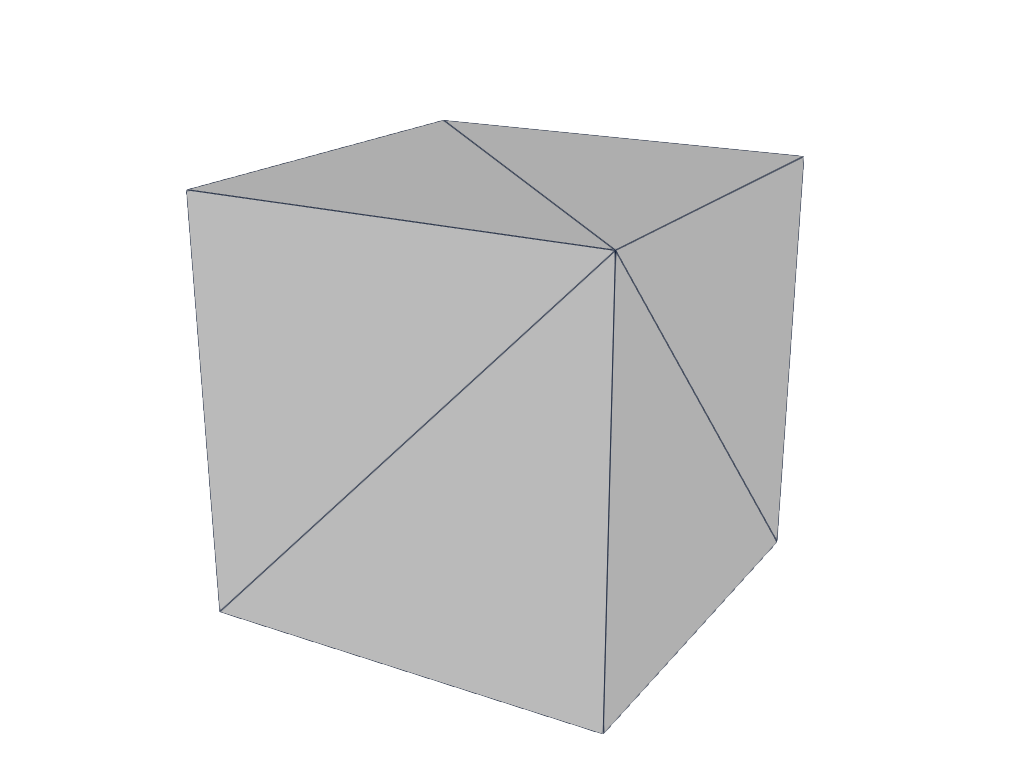
Two unit cubes offset diagonally by (0.5, 0.5, 0.5). From the same input pair, the four boolean ops produce:
A ∪ B — UNION (volume 1.875 = 2 − 0.125):
A ∩ B — INTERSECT (volume 0.125 = 0.5³):
A \ B — DIFFERENCE (volume 0.875 = 1 − 0.125):
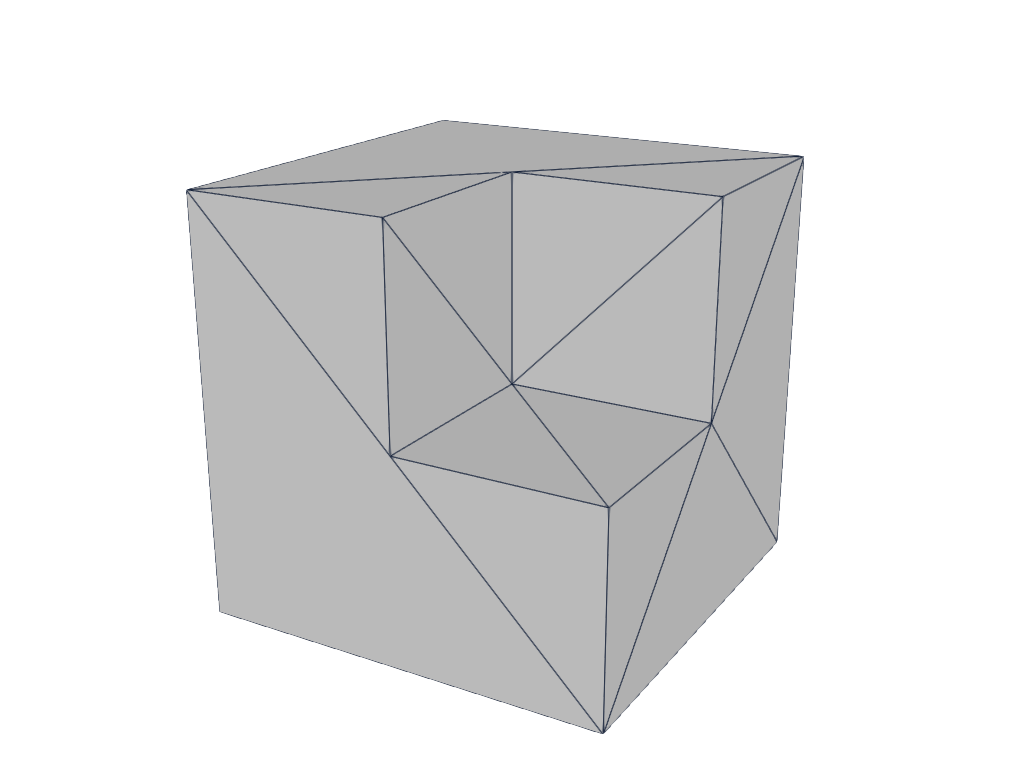
All three results match their analytic volume to FP precision.
Known limitations
Axis-aligned coplanar face overlaps produce wrong volumes even though
status == BOOL_STATUS_OK. Two failure modes contribute:- The Möller-style tri-tri test produces degenerate or NaN intervals when one triangle's edge lies on the other triangle's plane.
- Adjacent A-facets and B-facets sharing an edge along a coplanar region produce sub-triangles whose centroids are equidistant from both surfaces; the winding-number classifier evaluates to ~1 from both (rather than the textbook ~0.5), defeating the boundary detector that the shared-face truth table relies on.
This is a silent failure (no status code flags it) — the boolean returns successfully but the result volume is wrong.
Workaround for coplanar inputs: perturb one of the inputs by a small offset along each axis before the boolean, breaking the coplanarity and routing through the bit-exact generic codepath:
fortran! Avoid axis-aligned coplanar faces by 3D-offsetting B. call b%translate(delta=vector_R8P(eps, eps, eps)) call b%analyze call a%boolean(other=b, op=BOOL_DIFFERENCE, status=status)eps = 1e-6 * bbox_diagonalis a safe value: small enough to be numerically negligible in the output volume, large enough to defeat the coplanar pathology. The full discussion (with the two contributing failure modes) is in thesurface%booleansource docstring atsrc/lib/fossil_surface_stl.f90.Self-intersection in inputs (each surface intersecting itself) produces undefined results. Run
surface%resolve_self_intersectionsfirst if you suspect this is your case.CDT failures (
BOOL_STATUS_CDT_FAILED) signal that near-collinear arrangement segments couldn't be recovered into the retriangulation. Rare in practice; usually accompanies pathological input geometry.
See also
resolve_self_intersections— self-intersection cleanup, a pre-requisite for clean booleans.- winding number — used internally to classify each sub-triangle.
- Constants —
BOOL_*andBOOL_STATUS_*. - Roadmap issue — full multi-commit history including the coplanar-aware shared-boundary tagging that handles the well-behaved subset of degenerate cases.
References
- Zhou, Grinspun, Zorin & Jacobson, Mesh Arrangements for Solid Geometry, SIGGRAPH 2016. The reference algorithm.
- Bernstein & Fussell, Fast, Exact, Linear Booleans, Symposium on Geometry Processing 2009. The "Cork" precursor — historical context.
- Möller, A Fast Triangle-Triangle Intersection Test, Journal of Graphics Tools 2(2), 1997. Used for the tree-vs-tree narrow phase.
- Sloan, A fast algorithm for generating constrained Delaunay triangulations, Computers & Structures 47(3), 1993. The constraint recovery used in
fossil_dtPhase 2.