Appearance
Per-vertex Gaussian + mean curvature
What it does
Two TBPs that return scalar curvature fields, one value per vertex of the surface:
gaussian_curvature(K, status)— Gaussian curvatureK_icomputed from the angle defect at vertexi.K > 0on convex caps (sphere, ellipsoid),K < 0on saddles,K = 0on developable surfaces (cylinder, cone, flat plane).mean_curvature(H, status)— signed mean curvatureH_ifrom the mean-curvature normal identityH_i n_i = (1/2) M⁻¹ (L V)_i, with sign disambiguated by projection onto the per-vertex pseudo-normal.H > 0on outward-convex regions (sphere surface, cube corners),H < 0on saddles / concave-outward regions,H ≈ 0on flat regions.
Both build on cotangent Laplacian + barycentric mass. The mean variant in particular is a one-liner on top of (L, M): L V is the per-vertex mean-curvature normal scaled by 2 M_ii; inverting the diagonal mass and halving gives H n.
A correction worth surfacing
The feat(curvature,surface): per-vertex Gaussian curvature commit message claimed that the mean variant required a sparse linear solver. That was wrong. The mass matrix M is diagonal (barycentric per §2.1), so M⁻¹ is per-row scalar division — no factorisation needed. The mean variant shipped without any external dependency in the same release as Gaussian. The mean-curvature TBP docstring carries the retraction inline; this page records it once and moves on.
Pipeline
Gaussian — angle defect
For each interior vertex i:
where θ_i^T is the angle at vertex i inside triangle T, the sum runs over all triangles incident to i, and A_i = (1/3) Σ_{T ∋ i} A_T is the same barycentric vertex-area used in §2.1's mass matrix.
For boundary vertices the formula is (π − Σ θ) / A_i — half the angle defect, reflecting the fact that the surface doesn't wrap around i on the open side. FOSSIL detects boundary vertices automatically via the half-edge incidence pool.
The integrated angle defect Σ_i K_i A_i = 4π χ (Gauss–Bonnet) for any closed orientable manifold of Euler characteristic χ — χ = 2 for a topological sphere, χ = 0 for a torus. This is a standard regression oracle for the implementation.
Mean — mean-curvature normal
For each vertex i, compute the action of the cotangent Laplacian on the coordinate field V:
then form
The magnitude is H_i = ||H_i n_i||; the sign is decided by projecting onto the angle-weighted pseudo-normal computed by analyze (this is the same per-vertex pseudo-normal used by SIGN_PSEUDO_NORMAL for signed-distance queries). Outward-convex projection gives H > 0, inward-concave gives H < 0.
Both computations reuse the §2.1 per-triangle cotangent and area assembly. They run in a single pass over the facet array with O(N) storage; no sparse matrix is materialised by either TBP — the assembly is "on the fly" into the output vector.
API
Gaussian
fortran
call surface%gaussian_curvature(K, status)
class(surface_stl_object), intent(in) :: self
real(R8P), allocatable, intent(out) :: K(:)
integer(I4P), intent(out), optional :: status ! CURV_STATUS_*Output:
K(1:n_vertices)— per-vertex Gaussian curvature. Indexed by pool vertex id (pool%get_vertex_count()givesn_vertices). Boundary vertices use the half-defect formula; interior vertices the full formula.
Mean
fortran
call surface%mean_curvature(H, status)
class(surface_stl_object), intent(in) :: self
real(R8P), allocatable, intent(out) :: H(:)
integer(I4P), intent(out), optional :: status ! CURV_STATUS_*Output:
H(1:n_vertices)— per-vertex signed mean curvature. Positive on outward-convex regions, negative on saddle / inward-concave, ≈ 0 on flat regions.
Shared status codes:
CURV_STATUS_OK— operator built successfully.CURV_STATUS_BAD_INPUT— empty surface or uninitialised pool.CURV_STATUS_DEGENERATE_TRIANGLE— at least one triangle had area below tolerance and was skipped. The curvature field is still returned; degenerate vertices receive 0.
Pre-condition. analyze must have run (pseudo-normals populated). Every public construction path on surface_stl_object ensures this — load_from_file, adopt_facets, and sanitize all call analyze internally. The mean_curvature sign-disambiguation step is the only direct consumer of pseudo-normals among the curvature TBPs; Gaussian does not depend on them.
Examples
Gaussian curvature on a sphere
fortran
program ex_gaussian_curvature
use fossil
use fossil_facet_object, only : facet_object
use penf, only : I4P, R8P
use vecfor, only : vector_R8P
implicit none
type(surface_stl_object) :: sphere
type(facet_object), allocatable :: facets(:)
real(R8P), allocatable :: values(:,:,:), curv_k(:)
real(R8P) :: x, y, z, dx
integer(I4P), parameter :: ng = 32_I4P
integer(I4P) :: ix, iy, iz, status
! Build a unit-sphere surface: sample the analytic SDF on a 32^3 grid
! spanning [-2, 2]^3, then marching-cubes the iso=0 level set.
allocate(values(ng, ng, ng))
dx = 4._R8P / real(ng - 1_I4P, R8P)
do iz = 1_I4P, ng
z = -2._R8P + (iz - 1_I4P) * dx
do iy = 1_I4P, ng
y = -2._R8P + (iy - 1_I4P) * dx
do ix = 1_I4P, ng
x = -2._R8P + (ix - 1_I4P) * dx
values(ix, iy, iz) = sqrt(x*x + y*y + z*z) - 1._R8P
enddo
enddo
enddo
call extract_isosurface(values=values, bmin=vector_R8P(-2._R8P, -2._R8P, -2._R8P), &
bmax=vector_R8P(2._R8P, 2._R8P, 2._R8P), iso=0._R8P, &
surface=facets, status=status)
call sphere%adopt_facets(facets=facets)
call sphere%gaussian_curvature(K=curv_k, status=status)
print '(A,I0)', 'curv status = ', status
print '(A,I0)', 'n_vertices = ', size(curv_k, kind=I4P)
print '(A,ES12.5)', 'mean K = ', sum(curv_k) / real(size(curv_k, kind=I4P), R8P)
! A unit sphere has K = 1 everywhere; the discrete mean lands near 1
! (tessellation noise spreads the per-vertex values — see Known limitations).
endprogram ex_gaussian_curvatureMean curvature on a unit sphere
fortran
program ex_mean_curvature_sphere
use fossil
use fossil_facet_object, only : facet_object
use penf, only : I4P, R8P
use vecfor, only : vector_R8P
implicit none
type(surface_stl_object) :: sphere
type(facet_object), allocatable :: facets(:)
real(R8P), allocatable :: values(:,:,:), h_curv(:)
real(R8P) :: x, y, z, dx
integer(I4P), parameter :: ng = 32_I4P
integer(I4P) :: ix, iy, iz, n_pos, n_total, status
! Same unit-sphere construction as the Gaussian example above.
allocate(values(ng, ng, ng))
dx = 4._R8P / real(ng - 1_I4P, R8P)
do iz = 1_I4P, ng
z = -2._R8P + (iz - 1_I4P) * dx
do iy = 1_I4P, ng
y = -2._R8P + (iy - 1_I4P) * dx
do ix = 1_I4P, ng
x = -2._R8P + (ix - 1_I4P) * dx
values(ix, iy, iz) = sqrt(x*x + y*y + z*z) - 1._R8P
enddo
enddo
enddo
call extract_isosurface(values=values, bmin=vector_R8P(-2._R8P, -2._R8P, -2._R8P), &
bmax=vector_R8P(2._R8P, 2._R8P, 2._R8P), iso=0._R8P, &
surface=facets, status=status)
call sphere%adopt_facets(facets=facets)
call sphere%mean_curvature(H=h_curv, status=status)
n_total = size(h_curv, kind=I4P)
n_pos = count(h_curv > 0._R8P)
print '(A,ES12.5,A)', 'mean H = ', sum(h_curv) / real(n_total, R8P), &
' (analytic value for a unit sphere = 1.0)'
print '(A,I0,A,I0,A)', 'sign: ', n_pos, ' / ', n_total, ' vertices have H > 0'
! Expected: ~100% positive — the sphere surface is convex outward everywhere.
endprogram ex_mean_curvature_sphereCombining both for principal curvature follow-up
The two scalars together carry the full second-fundamental-form trace + determinant:
fortran
! Both shipped today:
call surface%gaussian_curvature(K=K, status=stat_K)
call surface%mean_curvature(H=H, status=stat_H)
! Principal curvatures (not yet a TBP — small follow-up):
! kappa1 = H + sqrt(max(0, H^2 - K))
! kappa2 = H - sqrt(max(0, H^2 - K))
! Pointwise on every vertex. Discriminant clamp guards floating-point
! noise on near-umbilical (kappa1 = kappa2) points.A principal_curvatures TBP is a documented follow-up — small wrapper, no new infrastructure. Tracked under issue #18.
Visual reference
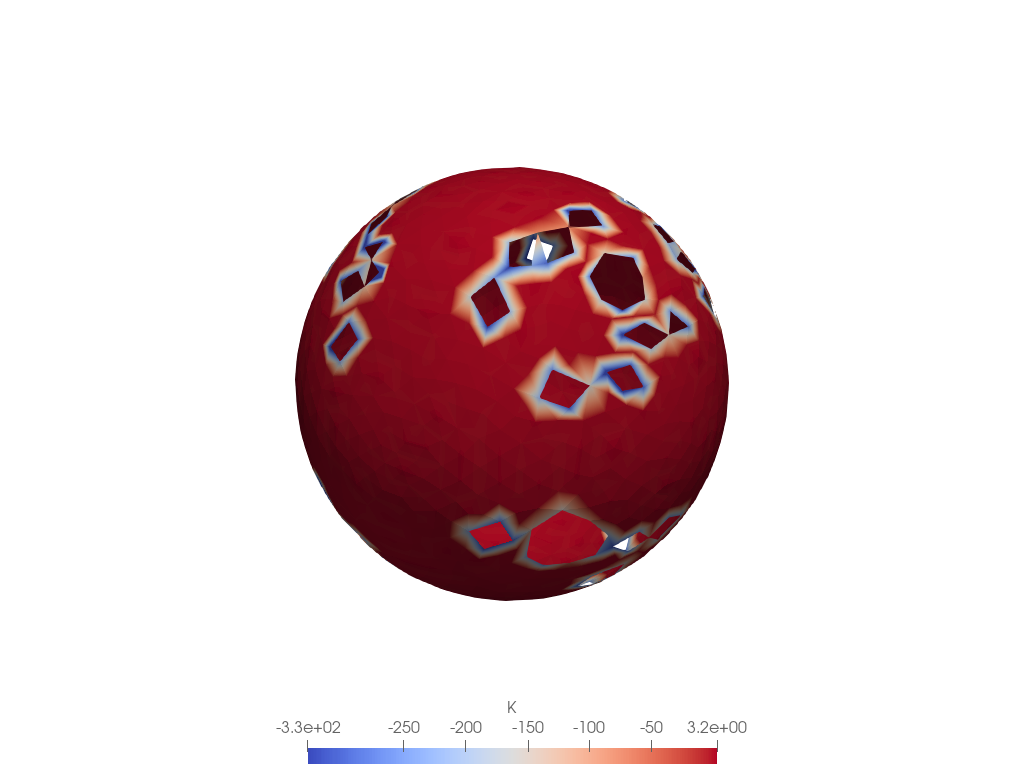
Gaussian curvature K on a unit sphere (built by marching cubes, then isotropically remeshed), coloured through a diverging map:
Signed mean curvature H on the same surface:
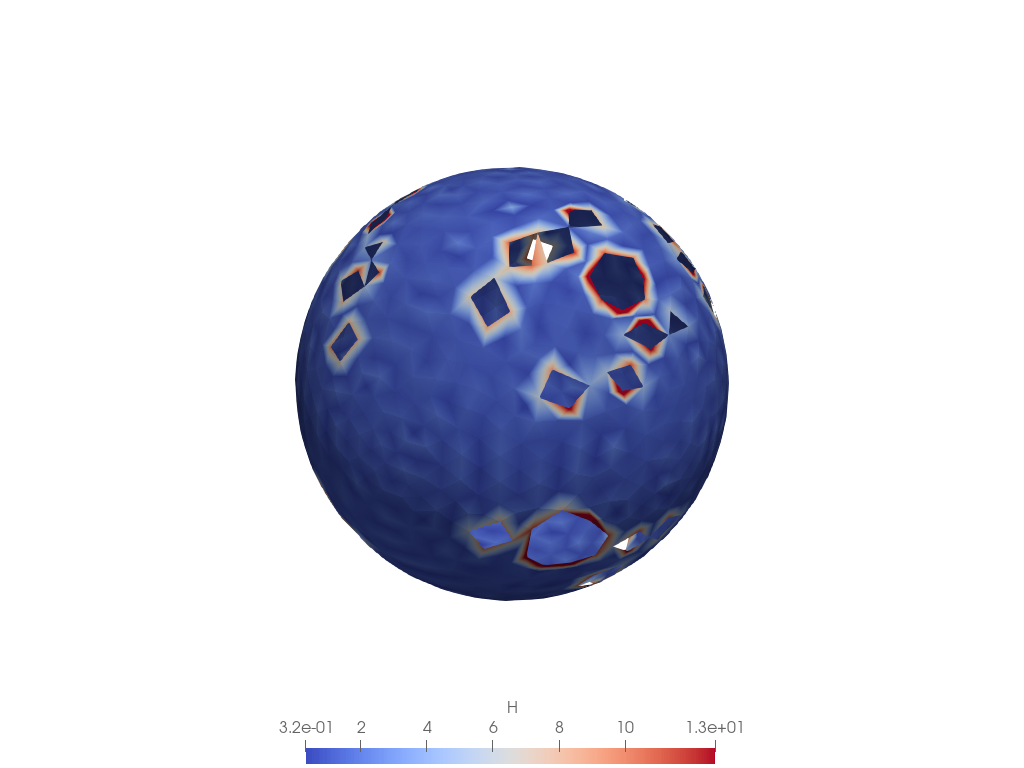
Read these figures honestly. The bulk of each sphere reads as a near-uniform colour — that uniform field is the correct answer: K ≈ 1 and H ≈ 1 everywhere on a unit sphere. The speckled hot-spot clusters are discrete-curvature artefacts at tessellation-degenerate vertices, exactly the coarse-mesh noise described in Known limitations below. They are not a rendering bug and they are not a bug in the curvature TBPs — they are what the discrete angle-defect and mean-curvature-normal formulae genuinely produce on the sliver triangles that survive even after a remesh of a marching-cubes sphere. The colour bar is clamped to the 2nd/98th percentile so the bulk signal stays visible despite the outliers. On a clean analytic triangulation the field is visibly uniform; on real CAD STL, run §1.7 isotropic remeshing first if the curvature field looks this noisy. The fixtures and renders are reproducible via scripts/make_doc_images.sh.
Known limitations
- Discrete curvature is noisy on coarse triangulations. Both formulae carry an
O(h)discretisation error wherehis the local edge length; on very-coarse meshes (cube with 12 facets, low-res MC) the values are dominated by tessellation artefact rather than smooth curvature. This is why the §2.4 tests target sphere + bunny rather than the cube — sphere has well-behaved curvature, bunny has enough vertices to swamp tessellation noise. Use §1.7 isotropic remeshing or §1.3 decimation first if the input is pathological. - Mean-curvature sign relies on the pseudo-normal. If the surface has inconsistent normal orientation (one patch flipped), the per-vertex pseudo-normal may point inward at some vertices and the sign of
Hthere will flip. Runsanitize_normals(or fullsanitize) beforemean_curvatureif the input is dirty. The unsigned magnitude|H|is robust regardless. - Principal curvatures and directions are not yet a TBP — only the trace (
H) and determinant-shadow (K) are returned. Computing(κ₁, κ₂, d₁, d₂)requires either (a) the algebraic combination shown in the example above for the eigenvalues, or (b) Rusinkiewicz 2004 per-vertex 3×3 covariance +dsyevLAPACK eigen-decomposition for the directions. The follow-up TBP is small but not yet shipped. - Discrete curvature is per-vertex, not per-facet. If you want a per-facet curvature scalar (e.g. for face-based segmentation), the standard recipe is to average the three incident vertex values — the curvature TBPs do not provide a per-facet helper.
See also
- cotangent Laplacian + barycentric mass — the prerequisite operator. Mean curvature is a one-liner on top of
(L, M). - mesh smoothing — the shipped smoothing variants reduce high-frequency surface noise; running
mean_curvatureafter a few Taubin passes gives noticeably cleanerHfields without volume loss. sanitize_normals— ensures the pseudo-normals used by mean-curvature sign disambiguation are consistently outward-oriented.- Constants —
CURV_STATUS_*.
References
- Meyer, Desbrun, Schröder & Barr, Discrete differential-geometry operators for triangulated 2-manifolds, VisMath 2003. The reference formulation for both
K_i(angle defect) andH_i n_i(mean-curvature normal), including the mixed-area mass discussion that informs the §2.1 follow-up. - Rusinkiewicz, Estimating curvatures and their derivatives on triangle meshes, 3DPVT 2004. The per-vertex 3×3 covariance method for principal curvatures and directions — the documented follow-up.
- Crane, Discrete Differential Geometry: An Applied Introduction, SIGGRAPH course notes 2013–2023. The pedagogical reference covering both Gauss–Bonnet on triangle meshes and the
H n = (1/2) M⁻¹ L Videntity used by the FOSSIL mean-curvature TBP. - do Carmo, Differential Geometry of Curves and Surfaces, Prentice-Hall 1976. The smooth-surface theory the discrete formulae approximate — useful when you need to remember why
H = (κ₁ + κ₂)/2andK = κ₁ κ₂.